2.6 使用Numpy和Scipy进行图像操作及处理
In [3]:
%matplotlib inline
import numpy as np
作者:Emmanuelle Gouillart, Gaël Varoquaux
这个部分解决用核心的科学模块NumPy和SciPy做基本的图像操作和处理。这个教程中涵盖的一些操作可能对于一些其他类型的多维度数据处理比对图像处理更加有用。特别是,子摸块scipy.ndimage提供了在N维Numpy数组上操作的方法。
也看一下: 对于更高级的图像处理和图像特有的程序,见专注于skimage模块教程Scikit-image: 图像处理。
图像 = 2-D 数值数组
(或者 3-D: CT, MRI, 2D + time; 4-D, ...)
这里, 图像 == Numpy 数组 np.array
本教程中使用的工具:
numpy: 基础的数组操作scipy:scipy.ndimage专注于图像处理的子模块 (n维 图像)。见文档:
In [1]:
from scipy import ndimage
图像处理中的常见任务:
- 输入/输出、显示图像
- 基础操作: 剪切, 翻转、旋转...
- 图像过滤: 降噪, 锐化
- 图形分割: 根据不同的对象标记像素
- 分类
- 特征提取
- 配准
- ...
章节内容
打开和写入图像文件
显示图像
基础操作
统计信息
几何图像变换
图像过滤
模糊/光滑
锐化
降噪
数学形态学
特征提取
边缘检测
分隔
测量对象属性: ndimage.measurements
2.6.1 打开和写入图像文件
将数组写入文件:
In [4]:
from scipy import misc
f = misc.face()
misc.imsave('face.png', f) # 使用图像模块 (PIL)
import matplotlib.pyplot as plt
plt.imshow(f)
plt.show()

从图像文件创建一个numpy数组:
In [5]:
from scipy import misc
face = misc.face()
misc.imsave('face.png', face) # 首先我们需要创建这个PNG文件
face = misc.imread('face.png')
type(face)
Out[5]:
numpy.ndarray
In [6]:
face.shape, face.dtype
Out[6]:
((768, 1024, 3), dtype('uint8'))
对于8位的图像 (0-255) dtype是uint8
打开raw文件 (照相机, 3-D 图像)
In [7]:
face.tofile('face.raw') # 创建raw文件
face_from_raw = np.fromfile('face.raw', dtype=np.uint8)
face_from_raw.shape
Out[7]:
(2359296,)
In [8]:
face_from_raw.shape = (768, 1024, 3)
需要知道图像的shape和dtype (如何去分离数据类型)。
对于大数据, 使用np.memmap来做内存映射:
In [9]:
face_memmap = np.memmap('face.raw', dtype=np.uint8, shape=(768, 1024, 3))
(数据从文件中读取,并没有加载到内存)
处理一组图像文件
In [10]:
for i in range(10):
im = np.random.random_integers(0, 255, 10000).reshape((100, 100))
misc.imsave('random_%02d.png' % i, im)
from glob import glob
filelist = glob('random*.png')
filelist.sort()
2.6.2 显示图像
使用matplotlib和imshow在matplotlib图形内部显示图像:
In [11]:
f = misc.face(gray=True) # 取回灰度图像
import matplotlib.pyplot as plt
plt.imshow(f, cmap=plt.cm.gray)
Out[11]:
<matplotlib.image.AxesImage at 0x10afb0bd0>

通过设置最小和最大值增加对比度:
In [14]:
plt.imshow(f, cmap=plt.cm.gray, vmin=30, vmax=200)
Out[14]:
<matplotlib.image.AxesImage at 0x110f8c6d0>

In [16]:
plt.imshow(f, cmap=plt.cm.gray, vmin=30, vmax=200)
# 删除座标轴和刻度
plt.axis('off')
Out[16]:
(-0.5, 1023.5, 767.5, -0.5)

画出轮廓线:
In [18]:
plt.imshow(f, cmap=plt.cm.gray, vmin=30, vmax=200)
# 删除座标轴和刻度
plt.axis('off')
plt.contour(f, [50, 200])
Out[18]:
<matplotlib.contour.QuadContourSet instance at 0x10cab5878>
对于要精确检查的密度变量,使用interpolation='nearest':
In [19]:
plt.imshow(f[320:340, 510:530], cmap=plt.cm.gray)
Out[19]:
<matplotlib.image.AxesImage at 0x10590da90>

In [20]:
plt.imshow(f[320:340, 510:530], cmap=plt.cm.gray, interpolation='nearest')
Out[20]:
<matplotlib.image.AxesImage at 0x110716c10>

也可以看一下 3-D 可视化: Mayavi
- Image plane widgets
- Isosurfaces
- ...
2.6.3 基础操作
图像是数组: 使用完整的numpy机制。
In [21]:
face = misc.face(gray=True)
face[0, 40]
Out[21]:
127
In [22]:
# 切片
face[10:13, 20:23]
Out[22]:
array([[141, 153, 145],
[133, 134, 125],
[ 96, 92, 94]], dtype=uint8)
In [24]:
face[100:120] = 255
lx, ly = face.shape
X, Y = np.ogrid[0:lx, 0:ly]
mask = (X - lx / 2) ** 2 + (Y - ly / 2) ** 2 > lx * ly / 4
# 掩码(masks)
face[mask] = 0
# 象征索引(Fancy indexing)
face[range(400), range(400)] = 255

2.6.3.1 统计信息
In [26]:
face = misc.face(gray=True)
face.mean()
Out[26]:
113.48026784261067
In [27]:
face.max(), face.min()
Out[27]:
(250, 0)
np.histogram
练习
- 将
scikit-imagelogo作为数组打开 (http://scikit-image.org/_static/img/logo.png), 或者在你电脑上的其他图像。 - 剪切图像的有意义部分,例如,logo中的python圆形。
- 用
matplotlib显示图像数组。改变interpolation方法并且放大看一下差异。 - 将你的图像改变为灰度
- 通过改变它的最小最大值增加图像的对比度。选做:使用
scipy.stats.scoreatpercentile(读一下文本字符串!) 来饱和最黑5%的像素和最亮5%的像素。 - 将数组保存为两个不同的文件格式 (png, jpg, tiff)
![]()
2.6.3.2 几何图像变换
In [28]:
face = misc.face(gray=True)
lx, ly = face.shape
# 剪切
crop_face = face[lx / 4: - lx / 4, ly / 4: - ly / 4]
# up <-> down 翻转
flip_ud_face = np.flipud(face)
# 旋转
rotate_face = ndimage.rotate(face, 45)
rotate_face_noreshape = ndimage.rotate(face, 45, reshape=False)

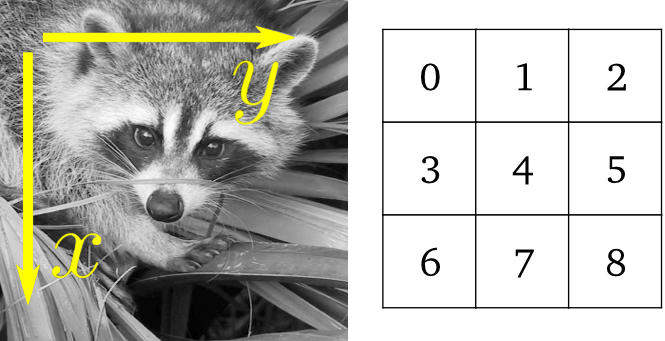
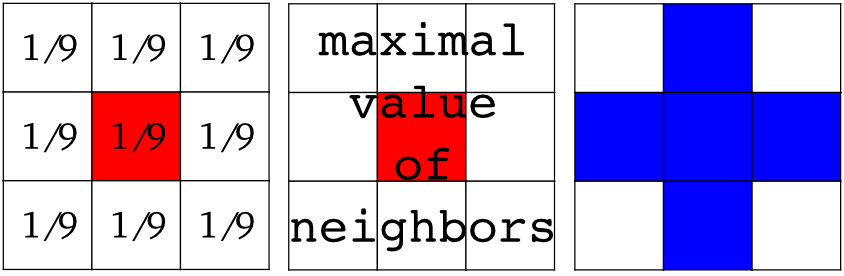
2.6.4 图像过滤
局部过滤器: 通过临近像素值的函数来替换像素的值。
邻居: 方块 (选择大小)、 硬盘、或者更复杂的结构化元素。
2.6.4.1 模糊 / 光滑
高斯过滤器 来自 scipy.ndimage:
In [29]:
from scipy import misc
face = misc.face(gray=True)
blurred_face = ndimage.gaussian_filter(face, sigma=3)
very_blurred = ndimage.gaussian_filter(face, sigma=5)
均匀过滤器
In [30]:
local_mean = ndimage.uniform_filter(face, size=11)

2.6.4.2 锐化
锐化模糊的图像:
In [31]:
from scipy import misc
face = misc.face(gray=True).astype(float)
blurred_f = ndimage.gaussian_filter(face, 3)
通过添加Laplacian的近似值来增加边缘的权重:
In [32]:
filter_blurred_f = ndimage.gaussian_filter(blurred_f, 1)
alpha = 30
sharpened = blurred_f + alpha * (blurred_f - filter_blurred_f)

2.6.4.3 降噪
有噪音的脸:
In [33]:
from scipy import misc
f = misc.face(gray=True)
f = f[230:290, 220:320]
noisy = f + 0.4 * f.std() * np.random.random(f.shape)
高斯过滤器光滑了噪音... 以及边缘:
In [34]:
gauss_denoised = ndimage.gaussian_filter(noisy, 2)
绝大多数局部线性各向同性过滤器模糊图像 (ndimage.uniform_filter)
中位数过滤器更好的保留的边缘:
In [35]:
med_denoised = ndimage.median_filter(noisy, 3)

中位数过滤器: 对直边缘的结果更好 (低曲度):
In [37]:
im = np.zeros((20, 20))
im[5:-5, 5:-5] = 1
im = ndimage.distance_transform_bf(im)
im_noise = im + 0.2 * np.random.randn(*im.shape)
im_med = ndimage.median_filter(im_noise, 3)

其他排名过滤器:ndimage.maximum_filter、ndimage.percentile_filter
其他的局部非线性过滤器: Wiener (scipy.signal.wiener) 等等.
非局部过滤器
练习: 降噪
- 创建一个带有一些对象 (圆形、椭圆、正方形或随机形状) 的二元图像 (0 和 1) .
- 添加一些噪音 (例如, 20% 的噪音)
- 用两种不同的降噪方法来降噪这个图像: 高斯过滤器和中位数过滤器。
- 比较两种不同降噪方法的直方图。哪一个与原始图像(无噪音)的直方图最接近?
也看一下: 在skimage.denoising中有更多的的降噪过滤器可用,见教程Scikit-image: 图像处理.
2.6.4.4 数学形态学
看一下wikipedia上的数学形态学定义。
探索一个简单形状 (结构化的元素) 的图像,然后根据这个形状是如何局部适应或不适应这个图像来修改这个图像。
结构化元素:
In [38]:
el = ndimage.generate_binary_structure(2, 1)
el
Out[38]:
array([[False, True, False],
[ True, True, True],
[False, True, False]], dtype=bool)
In [39]:
el.astype(np.int)
Out[39]:
array([[0, 1, 0],
[1, 1, 1],
[0, 1, 0]])
风化(Erosion) = 最小值过滤器。用结构化元素所覆盖的最小值来替换像素的值。:
In [41]:
a = np.zeros((7,7), dtype=np.int)
a[1:6, 2:5] = 1
a
Out[41]:
array([[0, 0, 0, 0, 0, 0, 0],
[0, 0, 1, 1, 1, 0, 0],
[0, 0, 1, 1, 1, 0, 0],
[0, 0, 1, 1, 1, 0, 0],
[0, 0, 1, 1, 1, 0, 0],
[0, 0, 1, 1, 1, 0, 0],
[0, 0, 0, 0, 0, 0, 0]])
In [42]:
ndimage.binary_erosion(a).astype(a.dtype)
Out[42]:
array([[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 1, 0, 0, 0],
[0, 0, 0, 1, 0, 0, 0],
[0, 0, 0, 1, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0]])
In [43]:
#风化删除了比结构小的对象
ndimage.binary_erosion(a, structure=np.ones((5,5))).astype(a.dtype)
Out[43]:
array([[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0]])
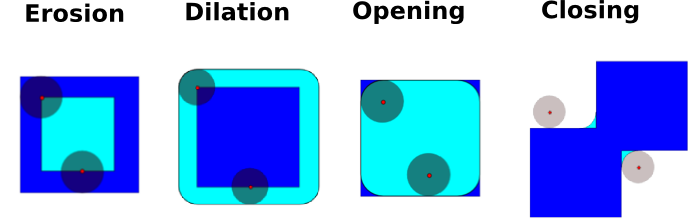
扩大(Dilation):最大值过滤器:
In [44]:
a = np.zeros((5, 5))
a[2, 2] = 1
a
Out[44]:
array([[ 0., 0., 0., 0., 0.],
[ 0., 0., 0., 0., 0.],
[ 0., 0., 1., 0., 0.],
[ 0., 0., 0., 0., 0.],
[ 0., 0., 0., 0., 0.]])
In [45]:
ndimage.binary_dilation(a).astype(a.dtype)
Out[45]:
array([[ 0., 0., 0., 0., 0.],
[ 0., 0., 1., 0., 0.],
[ 0., 1., 1., 1., 0.],
[ 0., 0., 1., 0., 0.],
[ 0., 0., 0., 0., 0.]])
对于灰度值图像同样适用:
In [46]:
np.random.seed(2)
im = np.zeros((64, 64))
x, y = (63*np.random.random((2, 8))).astype(np.int)
im[x, y] = np.arange(8)
bigger_points = ndimage.grey_dilation(im, size=(5, 5), structure=np.ones((5, 5)))
square = np.zeros((16, 16))
square[4:-4, 4:-4] = 1
dist = ndimage.distance_transform_bf(square)
dilate_dist = ndimage.grey_dilation(dist, size=(3, 3), structure=np.ones((3, 3)))

Opening: erosion + dilation:
In [48]:
a = np.zeros((5,5), dtype=np.int)
a[1:4, 1:4] = 1; a[4, 4] = 1
a
Out[48]:
array([[0, 0, 0, 0, 0],
[0, 1, 1, 1, 0],
[0, 1, 1, 1, 0],
[0, 1, 1, 1, 0],
[0, 0, 0, 0, 1]])
In [49]:
# Opening 删除小对象
ndimage.binary_opening(a, structure=np.ones((3,3))).astype(np.int)
Out[49]:
array([[0, 0, 0, 0, 0],
[0, 1, 1, 1, 0],
[0, 1, 1, 1, 0],
[0, 1, 1, 1, 0],
[0, 0, 0, 0, 0]])
In [50]:
# Opening 也可以光滑转角
ndimage.binary_opening(a).astype(np.int)
Out[50]:
array([[0, 0, 0, 0, 0],
[0, 0, 1, 0, 0],
[0, 1, 1, 1, 0],
[0, 0, 1, 0, 0],
[0, 0, 0, 0, 0]])
应用: 去除噪音:
In [51]:
square = np.zeros((32, 32))
square[10:-10, 10:-10] = 1
np.random.seed(2)
x, y = (32*np.random.random((2, 20))).astype(np.int)
square[x, y] = 1
open_square = ndimage.binary_opening(square)
eroded_square = ndimage.binary_erosion(square)
reconstruction = ndimage.binary_propagation(eroded_square, mask=square)

Closing: dilation + erosion 许多其他的数学形态学操作: hit 和 miss 转换、tophat等等。
2.6.5.2 分割
- 直方图分割 (没有空间信息)
In [52]:
n = 10
l = 256
im = np.zeros((l, l))
np.random.seed(1)
points = l*np.random.random((2, n**2))
im[(points[0]).astype(np.int), (points[1]).astype(np.int)] = 1
im = ndimage.gaussian_filter(im, sigma=l/(4.*n))
mask = (im > im.mean()).astype(np.float)
mask += 0.1 * im
img = mask + 0.2*np.random.randn(*mask.shape)
hist, bin_edges = np.histogram(img, bins=60)
bin_centers = 0.5*(bin_edges[:-1] + bin_edges[1:])
binary_img = img > 0.5

用数学形态学来清理结果:
In [53]:
# 删除小白色区域
open_img = ndimage.binary_opening(binary_img)
# 删除小黑洞
close_img = ndimage.binary_closing(open_img)

练习
检查重建操作 (erosion + propagation) 生成一个比opening/closing更好的结果:
In [55]:
eroded_img = ndimage.binary_erosion(binary_img)
reconstruct_img = ndimage.binary_propagation(eroded_img, mask=binary_img)
tmp = np.logical_not(reconstruct_img)
eroded_tmp = ndimage.binary_erosion(tmp)
reconstruct_final = np.logical_not(ndimage.binary_propagation(eroded_tmp, mask=tmp))
np.abs(mask - close_img).mean()
Out[55]:
0.0072783654884356133
In [56]:
np.abs(mask - reconstruct_final).mean()
Out[56]:
0.00059502552803868841
练习
检查第一步降噪 (例如,中位数过滤器) 如何影响直方图,检查产生的基于直方图的分割是否更加准确。
也可以看一下:更高级分割算法可以在scikit-image中找到: 见Scikit-image: 图像处理。
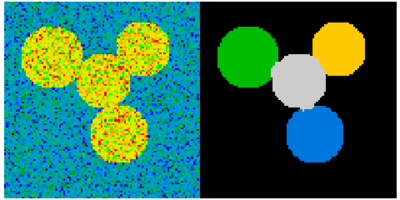
也可以看一下:其他科学计算包为图像处理提供的算法。在这个例子中,我们使用scikit-learn中的谱聚类函数以便分割黏在一起的对象。
In [57]:
from sklearn.feature_extraction import image
from sklearn.cluster import spectral_clustering
l = 100
x, y = np.indices((l, l))
center1 = (28, 24)
center2 = (40, 50)
center3 = (67, 58)
center4 = (24, 70)
radius1, radius2, radius3, radius4 = 16, 14, 15, 14
circle1 = (x - center1[0])**2 + (y - center1[1])**2 < radius1**2
circle2 = (x - center2[0])**2 + (y - center2[1])**2 < radius2**2
circle3 = (x - center3[0])**2 + (y - center3[1])**2 < radius3**2
circle4 = (x - center4[0])**2 + (y - center4[1])**2 < radius4**2
# 4个圆形
img = circle1 + circle2 + circle3 + circle4
mask = img.astype(bool)
img = img.astype(float)
img += 1 + 0.2*np.random.randn(*img.shape)
# 将图像转化为边缘带有坡度值的图。
graph = image.img_to_graph(img, mask=mask)
# 用一个梯度递减函数: 我们用它轻度依赖于接近voronoi的梯度细分
graph.data = np.exp(-graph.data/graph.data.std())
labels = spectral_clustering(graph, n_clusters=4, eigen_solver='arpack')
label_im = -np.ones(mask.shape)
label_im[mask] = labels
2.6.6 测量对象属性: ndimage.measurements
合成数据:
In [59]:
n = 10
l = 256
im = np.zeros((l, l))
points = l*np.random.random((2, n**2))
im[(points[0]).astype(np.int), (points[1]).astype(np.int)] = 1
im = ndimage.gaussian_filter(im, sigma=l/(4.*n))
mask = im > im.mean()
- 联通分支分析
标记联通分支:ndimage.label:
In [60]:
label_im, nb_labels = ndimage.label(mask)
nb_labels # 多少区域?
plt.imshow(label_im)
Out[60]:
<matplotlib.image.AxesImage at 0x11543ab10>


计算每个区域的大小、mean_value等等:
In [61]:
sizes = ndimage.sum(mask, label_im, range(nb_labels + 1))
mean_vals = ndimage.sum(im, label_im, range(1, nb_labels + 1))
清理小的联通分支:
In [62]:
mask_size = sizes < 1000
remove_pixel = mask_size[label_im]
remove_pixel.shape
label_im[remove_pixel] = 0
plt.imshow(label_im)
Out[62]:
<matplotlib.image.AxesImage at 0x114644a90>

现在用np.searchsorted重新分配标签:
In [63]:
labels = np.unique(label_im)
label_im = np.searchsorted(labels, label_im)

找到包含感兴趣对象的区域:
In [65]:
slice_x, slice_y = ndimage.find_objects(label_im==4)[0]
roi = im[slice_x, slice_y]
plt.imshow(roi)
Out[65]:
<matplotlib.image.AxesImage at 0x1147fa8d0>

其他空间测量: ndimage.center_of_mass, ndimage.maximum_position, 等等,可以在分割应用这个有限的部分之外使用。
实例: 块平均数:
In [66]:
from scipy import misc
f = misc.face(gray=True)
sx, sy = f.shape
X, Y = np.ogrid[0:sx, 0:sy]
regions = (sy//6) * (X//4) + (Y//6) # 注意我们使用广播
block_mean = ndimage.mean(f, labels=regions, index=np.arange(1, regions.max() +1))
block_mean.shape = (sx // 4, sy // 6)

当区域是标准的块时,使用步长刻度更加高效 (实例: 使用刻度的虚假维度)。
非标准空间块: radial平均:
In [67]:
sx, sy = f.shape
X, Y = np.ogrid[0:sx, 0:sy]
r = np.hypot(X - sx/2, Y - sy/2)
rbin = (20* r/r.max()).astype(np.int)
radial_mean = ndimage.mean(f, labels=rbin, index=np.arange(1, rbin.max() +1))

- 其他测量
相关函数、Fourier/wavelet频谱、等㩐。
使用数学形态学的一个实例: granulometry
In [69]:
def disk_structure(n):
struct = np.zeros((2 * n + 1, 2 * n + 1))
x, y = np.indices((2 * n + 1, 2 * n + 1))
mask = (x - n)**2 + (y - n)**2 <= n**2
struct[mask] = 1
return struct.astype(np.bool)
def granulometry(data, sizes=None):
s = max(data.shape)
if sizes == None:
sizes = range(1, s/2, 2)
granulo = [ndimage.binary_opening(data, \
structure=disk_structure(n)).sum() for n in sizes]
return granulo
np.random.seed(1)
n = 10
l = 256
im = np.zeros((l, l))
points = l*np.random.random((2, n**2))
im[(points[0]).astype(np.int), (points[1]).astype(np.int)] = 1
im = ndimage.gaussian_filter(im, sigma=l/(4.*n))
mask = im > im.mean()
granulo = granulometry(mask, sizes=np.arange(2, 19, 4))
/Library/Frameworks/Python.framework/Versions/2.7/lib/python2.7/site-packages/ipykernel/__main__.py:11: FutureWarning: comparison to `None` will result in an elementwise object comparison in the future.

也看一下: 关于图像处理的更多内容:
- 关于Scikit-image的章节
- 其他更有力更完整的模块: OpenCV (Python绑定), CellProfiler, ITK 带有Python绑定