四、图像预处理
作者:Chris Albon
译者:飞龙
图像二值化
# 加载库
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 将图像加载为灰度
image_grey = cv2.imread('img/plane_256x256.jpg', cv2.IMREAD_GRAYSCALE)
# 应用自适应阈值
max_output_value = 255
neighorhood_size = 99
subtract_from_mean = 10
image_binarized = cv2.adaptiveThreshold(image_grey,
max_output_value,
cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY,
neighorhood_size,
subtract_from_mean)
# 展示图像
plt.imshow(image_binarized, cmap='gray'), plt.axis("off")
plt.show()

图像模糊
# 加载库
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 将图像加载为灰度
image = cv2.imread('img/plane_256x256.jpg', cv2.IMREAD_GRAYSCALE)
# 使图像模糊
image_blurry = cv2.blur(image, (5,5))
# 展示图像
plt.imshow(image_blurry, cmap='gray'), plt.xticks([]), plt.yticks([])
plt.show()

图像剪裁
# 加载库
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 将图像加载为灰度
image = cv2.imread('img/plane_256x256.jpg', cv2.IMREAD_GRAYSCALE)
# 选择所有行,和前一半的列
image_cropped = image[:,:126]
# 查看图像
plt.imshow(image_cropped, cmap='gray'), plt.axis("off")
plt.show()

边缘检测
# 加载库
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 将图像加载为灰度
image_gray = cv2.imread('img/plane_256x256.jpg', cv2.IMREAD_GRAYSCALE)
# 计算强度中值
median_intensity = np.median(image_gray)
# 将阈值设为强度中值上下一个标准差
lower_threshold = int(max(0, (1.0 - 0.33) * median_intensity))
upper_threshold = int(min(255, (1.0 + 0.33) * median_intensity))
# 应用 canny 边缘检测
image_canny = cv2.Canny(image_gray, lower_threshold, upper_threshold)
# 展示图像
plt.imshow(image_canny, cmap='gray'), plt.axis("off")
plt.show()

增强彩色图像的对比度
# 加载库
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 加载图像
image_bgr = cv2.imread('img/plane.jpg')
# 转换为 YUV
image_yuv = cv2.cvtColor(image_bgr, cv2.COLOR_BGR2YUV)
# 应用直方图均衡
image_yuv[:, :, 0] = cv2.equalizeHist(image_yuv[:, :, 0])
# 转换为 RGB
image_rgb = cv2.cvtColor(image_yuv, cv2.COLOR_YUV2RGB)
# 展示图像
plt.imshow(image_rgb), plt.axis("off")
plt.show()

增强灰度图像的对比度
# 加载库
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 将图像加载为灰度
image = cv2.imread('img/plane_256x256.jpg', cv2.IMREAD_GRAYSCALE)
# 增强图像
image_enhanced = cv2.equalizeHist(image)
# 展示图像
plt.imshow(image_enhanced, cmap='gray'), plt.axis("off")
plt.show()

Harris 角点检测
Harris 角点检测器是检测两个边缘角点的常用方法。 它寻找窗口(也称为邻域或补丁),其中窗口的小移动(想象摇动窗口)使窗口内的像素内容产生大的变化。
# 加载库
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 将图像加载为灰度
image_bgr = cv2.imread('img/plane_256x256.jpg')
image_gray = cv2.cvtColor(image_bgr, cv2.COLOR_BGR2GRAY)
image_gray = np.float32(image_gray)
# 设置角点检测器的参数
block_size = 2
aperture = 29
free_parameter = 0.04
# 检测角点
detector_responses = cv2.cornerHarris(image_gray, block_size, aperture, free_parameter)
# 大型角点标记器
detector_responses = cv2.dilate(detector_responses, None)
# 只保留大于阈值的检测器结果,标记为白色
threshold = 0.02
image_bgr[detector_responses > threshold * detector_responses.max()] = [255,255,255]
# 转换为灰度
image_gray = cv2.cvtColor(image_bgr, cv2.COLOR_BGR2GRAY)
# 展示图像
plt.imshow(image_gray, cmap='gray'), plt.axis("off")
plt.show()

安装 OpenCV
虽然有许多好的库,OpenCV 是最受欢迎和文档最全的图像处理库。 使用 OpenCV 的最大障碍之一就是安装它。 但是,幸运的是,我们可以使用 Anaconda 的软件包管理器工具 conda,在我们的终端中用一行代码安装 OpenCV:
conda install --channel https://conda.anaconda.org/menpo opencv3
之后,我们可以通过打开笔记本,导入 OpenCV 并检查版本号(3.1.0)来检查安装:
# 加载库
import cv2
# 查看版本号
cv2.__version__
# '3.2.0'
颜色隔离
# 加载库
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 加载图像
image_bgr = cv2.imread('img/plane_256x256.jpg')
# 将 BGR 转换为 HSV
image_hsv = cv2.cvtColor(image_bgr, cv2.COLOR_BGR2HSV)
# 定义 HSV 中蓝色值的范围
lower_blue = np.array([50,100,50])
upper_blue = np.array([130,255,255])
# 创建遮罩
mask = cv2.inRange(image_hsv, lower_blue, upper_blue)
# 屏蔽图像
image_bgr_masked = cv2.bitwise_and(image_bgr, image_bgr, mask=mask)
# 将 BGR 转换为 RGB
image_rgb = cv2.cvtColor(image_bgr_masked, cv2.COLOR_BGR2RGB)
# 展示图像
plt.imshow(image_rgb), plt.axis("off")
plt.show()

加载图像
# 加载库
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 将图像加载为灰度
image = cv2.imread('img/plane.jpg', cv2.IMREAD_GRAYSCALE)
# 展示图像
plt.imshow(image, cmap='gray'), plt.axis("off")
plt.show()

# 加载彩色图像
image_bgr = cv2.imread('img/plane.jpg', cv2.IMREAD_COLOR)
# 转换为 RGB
image_rgb = cv2.cvtColor(image_bgr, cv2.COLOR_BGR2RGB)
# 展示图像
plt.imshow(image_rgb), plt.axis("off")
plt.show()

# 展示图像数据
image
'''
array([[140, 136, 146, ..., 132, 139, 134],
[144, 136, 149, ..., 142, 124, 126],
[152, 139, 144, ..., 121, 127, 134],
...,
[156, 146, 144, ..., 157, 154, 151],
[146, 150, 147, ..., 156, 158, 157],
[143, 138, 147, ..., 156, 157, 157]], dtype=uint8)
'''
# 展示维度
image.shape
# (2270, 3600)
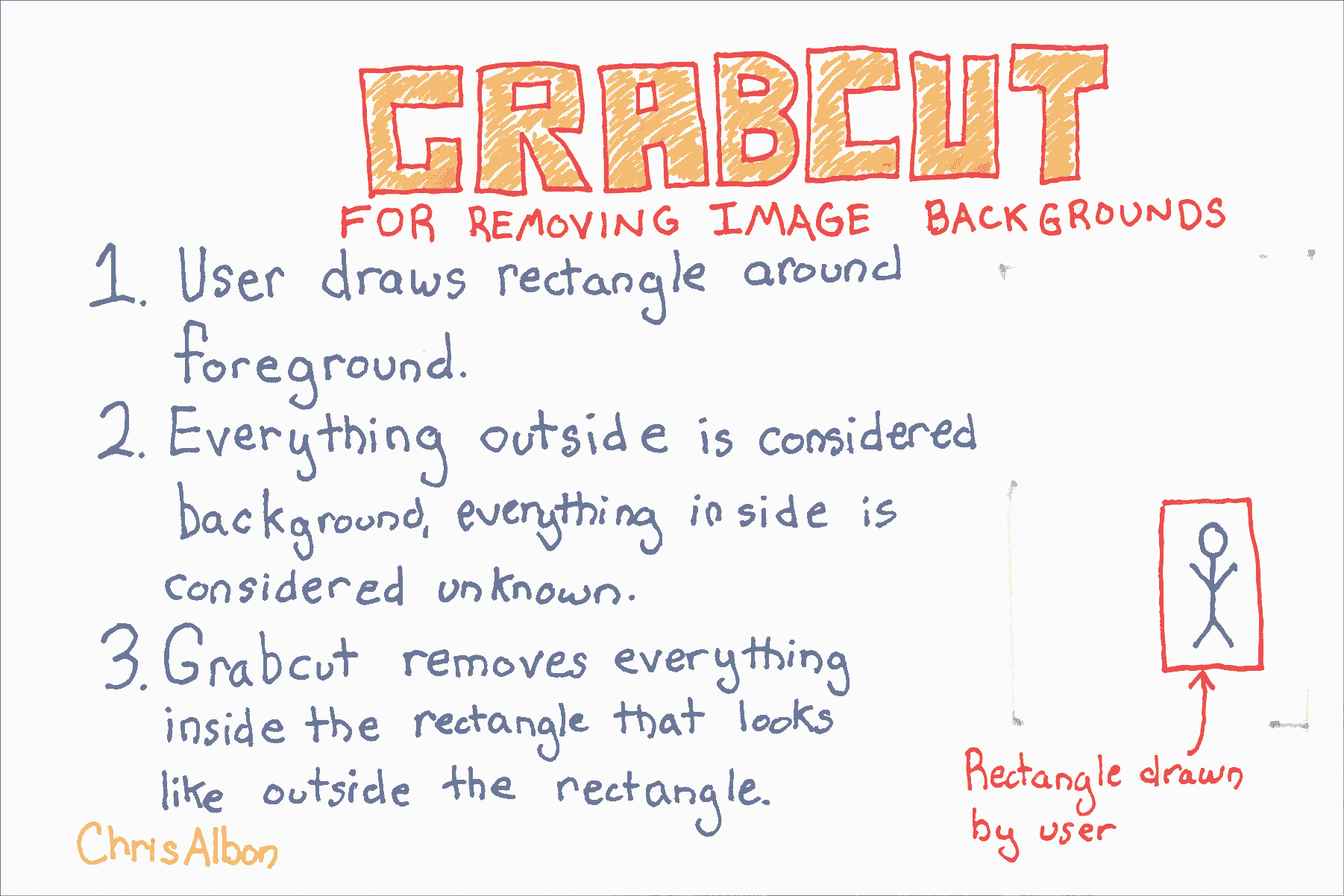
背景移除
# 加载库
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 加载图像
image_bgr = cv2.imread('img/plane_256x256.jpg')
# 转换为 RGB
image_rgb = cv2.cvtColor(image_bgr, cv2.COLOR_BGR2RGB)
# 矩形值:起点 x,起点 y,宽度,高度
rectangle = (0, 56, 256, 150)
# 创建初始遮罩
mask = np.zeros(image_rgb.shape[:2], np.uint8)
# 创建用于 grabCut 的临时数组
bgdModel = np.zeros((1, 65), np.float64)
fgdModel = np.zeros((1, 65), np.float64)
# 执行 grabCut
cv2.grabCut(image_rgb, # 我们的图像
mask, # 遮罩
rectangle, # 我们的矩形
bgdModel, # 用于背景的临时数组
fgdModel, # 用于前景的临时数组
5, # 迭代数量
cv2.GC_INIT_WITH_RECT) # 使用我们的矩形来初始化
# 创建遮罩,其中背景设置为 0,否则为 1
mask_2 = np.where((mask==2) | (mask==0), 0, 1).astype('uint8')
# 使用新的遮罩移除多个图像的背景
image_rgb_nobg = image_rgb * mask_2[:, :, np.newaxis]
# 展示图像
plt.imshow(image_rgb_nobg), plt.axis("off")
plt.show()

保存图像
# 加载库
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 将图像加载为灰度
image = cv2.imread('img/plane.jpg', cv2.IMREAD_GRAYSCALE)
# 展示图像
plt.imshow(image, cmap='gray'), plt.axis("off")
plt.show()

# 保存图像
cv2.imwrite('img/plane_new.jpg', image)
# True
图像锐化
# 加载库
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 将图像加载为灰度
image = cv2.imread('img/plane_256x256.jpg', cv2.IMREAD_GRAYSCALE)
# 创建核
kernel = np.array([[0, -1, 0],
[-1, 5,-1],
[0, -1, 0]])
# 锐化图像
image_sharp = cv2.filter2D(image, -1, kernel)
# 展示图像
plt.imshow(image_sharp, cmap='gray'), plt.axis("off")
plt.show()

Shi-Tomasi 角点检测
# 加载库
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 加载图像
image_bgr = cv2.imread('img/plane_256x256.jpg')
image_gray = cv2.cvtColor(image_bgr, cv2.COLOR_BGR2GRAY)
# 要检测的角点数量
corners_to_detect = 10
minimum_quality_score = 0.05
minimum_distance = 25
# 检测角点
corners = cv2.goodFeaturesToTrack(image_gray,
corners_to_detect,
minimum_quality_score,
minimum_distance)
corners = np.float32(corners)
# 在每个角点上绘制白色圆圈
for corner in corners:
x, y = corner[0]
cv2.circle(image_bgr, (x,y), 10, (255,255,255), -1)
# 转换为灰度
image_gray = cv2.cvtColor(image_bgr, cv2.COLOR_BGR2GRAY)
# 展示图像
plt.imshow(image_gray, cmap='gray'), plt.axis("off")
plt.show()

使用颜色均值作为特征
# 加载库
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 将图像加载为 BGR
image_bgr = cv2.imread('img/plane_256x256.jpg', cv2.IMREAD_COLOR)
# 计算每个通道的均值
channels = cv2.mean(image_bgr)
# 交换蓝色和红色值(使其变成 RGB 而不是 BGR)
observation = np.array([(channels[2], channels[1], channels[0])])
# 展示通道的均值
observation
# array([[ 90.53204346, 133.11735535, 169.03074646]])
# 展示图像
plt.imshow(observation), plt.axis("off")
plt.show()
