Vanishing & Exploding Gradients
- gradients get smaller as algorithm progresses to lower layers. Eventually GD leaves lower weights virtually unchanged. so training never converges.
- gradients can also grow out of control (often seen in RNNs).
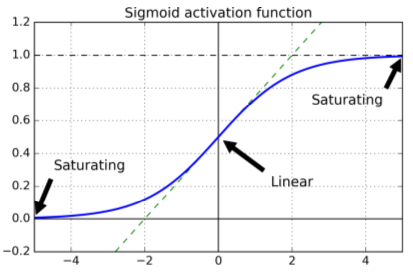
- Significant paper - using combo of logistic sigmoid activiation with random weight initialization (normal, mean=0, stdev=1) -- output variance was >> input variance.
- logistic activation: function saturates at 0 or 1 with derivative very close to 0 ==> so backpropagation has no gradient to use.
Xavier & He Initialization
- For signals to flow properly in both directions, each layer's output variance should equal its input variance.
- Recommends initializing connection weights with random settings using #ins, #outs
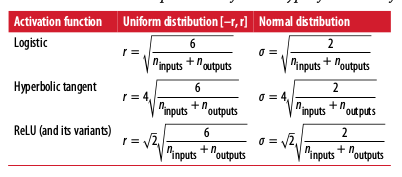
- Default: fully_connected() function uses Xavier initialization w/ uniform distribution. Change to He initialization by using variance_scaling_initializer() function
import tensorflow as tf
from tensorflow.contrib.layers import fully_connected
n_inputs = 28*28
n_hidden1 = 300
X = tf.placeholder(tf.float32, shape=(None, n_inputs), name="X")
he_init = tf.contrib.layers.variance_scaling_initializer()
hidden1 = fully_connected(X, n_hidden1, weights_initializer=he_init, scope="h1")
Non-Saturating Activation Functions
- ReLU activations suffer from dying ReLU problem (they stop emitting anything other than zero).
- Workaround: the leaku ReLU. Alpha defines leakage; typical set to 0.01.
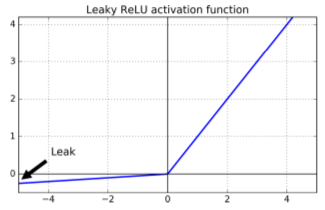
- Also: randomized leaky ReLU (RReLU) (randomized alpha)
- Also: parametric leaky RuLE (PReLU) (alpha can be modified during backprop)
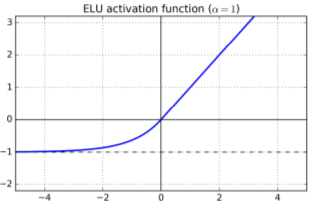
- Also: exponential linear unit (ELU). Allows negative values when z<0; non-zero gradient for z<0 (avoids dying units issue); smooth function everywhere. Uses exponential function, so harder to compute. paper
# TF doesn't have leaky ReLU predefined, but easy to build.
def leaky_relu(z, name=None):
return tf.maximum(0.01 * z, z, name=name)
hidden1 = fully_connected(X, n_hidden1, activation_fn=leaky_relu)
Batch Normalization
- proposed to solve vanishing/exploding gradients.
- Idea: pror to activation function, 1) zero-center & normalize inputs 2) scale & shift result with 2 new params per layer
- Net effect: model learns optimal scale & mean of inputs for each layer
Algorithm:
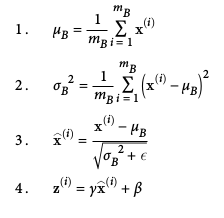
Does add computational complexity. Consider plain ELU + He initializaton as well.
Batch Normalization with TF
- batch_normalization() - centers & normalizes inputs
- batch_norm() - above, plus finds mean, stdev, scaling, offset params
- call directly or include it in fully_connected() arguments
# use MNIST dataset again
from tensorflow.examples.tutorials.mnist import input_data
mnist = input_data.read_data_sets("/tmp/data/")
Successfully downloaded train-images-idx3-ubyte.gz 9912422 bytes.
Extracting /tmp/data/train-images-idx3-ubyte.gz
Successfully downloaded train-labels-idx1-ubyte.gz 28881 bytes.
Extracting /tmp/data/train-labels-idx1-ubyte.gz
Successfully downloaded t10k-images-idx3-ubyte.gz 1648877 bytes.
Extracting /tmp/data/t10k-images-idx3-ubyte.gz
Successfully downloaded t10k-labels-idx1-ubyte.gz 4542 bytes.
Extracting /tmp/data/t10k-labels-idx1-ubyte.gz
#setup
import tensorflow as tf
from tensorflow.contrib.layers import batch_norm, fully_connected
tf.reset_default_graph()
n_inputs = 28 * 28
n_hidden1 = 300
n_hidden2 = 100
n_outputs = 10
learning_rate = 0.01
X = tf.placeholder(tf.float32, shape=(None, n_inputs), name="X")
y = tf.placeholder(tf.int64, shape=(None), name="y")
def leaky_relu(z, name=None):
return tf.maximum(0.01 * z, z, name=name)
# is_training: tells batch_norm() whether to use current minibatch's mean & stdev
# (found during training) or use running avgs (during testing)
with tf.name_scope("dnn"):
hidden1 = fully_connected(X, n_hidden1, activation_fn=leaky_relu, scope="hidden1")
hidden2 = fully_connected(hidden1, n_hidden2, activation_fn=leaky_relu, scope="hidden2")
logits = fully_connected(hidden2, n_outputs, activation_fn=None, scope="outputs")
with tf.name_scope("loss"):
xentropy = tf.nn.sparse_softmax_cross_entropy_with_logits(labels=y, logits=logits)
loss = tf.reduce_mean(xentropy, name="loss")
with tf.name_scope("train"):
optimizer = tf.train.GradientDescentOptimizer(learning_rate)
training_op = optimizer.minimize(loss)
with tf.name_scope("eval"):
correct = tf.nn.in_top_k(logits, y, 1)
accuracy = tf.reduce_mean(tf.cast(correct, tf.float32))
init = tf.global_variables_initializer()
saver = tf.train.Saver()
n_epochs = 20
batch_size = 100
with tf.Session() as sess:
init.run()
for epoch in range(n_epochs):
for iteration in range(len(mnist.test.labels)//batch_size):
X_batch, y_batch = mnist.train.next_batch(batch_size)
sess.run(training_op, feed_dict={X: X_batch, y: y_batch})
acc_train = accuracy.eval(feed_dict={X: X_batch, y: y_batch})
acc_test = accuracy.eval(feed_dict={X: mnist.test.images, y: mnist.test.labels})
print(epoch, "Train accuracy:", acc_train, "Test accuracy:", acc_test)
save_path = saver.save(sess, "my_model_final.ckpt")
0 Train accuracy: 0.6 Test accuracy: 0.642
1 Train accuracy: 0.73 Test accuracy: 0.7824
2 Train accuracy: 0.81 Test accuracy: 0.827
3 Train accuracy: 0.84 Test accuracy: 0.8539
4 Train accuracy: 0.8 Test accuracy: 0.8686
5 Train accuracy: 0.87 Test accuracy: 0.8759
6 Train accuracy: 0.85 Test accuracy: 0.8843
7 Train accuracy: 0.91 Test accuracy: 0.8903
8 Train accuracy: 0.86 Test accuracy: 0.8969
9 Train accuracy: 0.91 Test accuracy: 0.9018
10 Train accuracy: 0.91 Test accuracy: 0.9014
11 Train accuracy: 0.86 Test accuracy: 0.9065
12 Train accuracy: 0.88 Test accuracy: 0.9078
13 Train accuracy: 0.87 Test accuracy: 0.91
14 Train accuracy: 0.93 Test accuracy: 0.911
15 Train accuracy: 0.9 Test accuracy: 0.9123
16 Train accuracy: 0.91 Test accuracy: 0.9141
17 Train accuracy: 0.9 Test accuracy: 0.9149
18 Train accuracy: 0.92 Test accuracy: 0.9159
19 Train accuracy: 0.93 Test accuracy: 0.9174
Gradient Clipping
- to limit exploding gradients problem. Clip during backprop.
- Typical use case: recurrent NNs.
- source
- Uses TF minimize() function in optimizer.
threshold = 1.0
optimizer = tf.train.GradientDescentOptimizer(
learning_rate)
grads_and_vars = optimizer.compute_gradients(
loss)
capped_gvs = [
(tf.clip_by_value(
grad, -threshold, threshold), var)
for grad, var in grads_and_vars]
training_op = optimizer.apply_gradients(capped_gvs)
Pretrained Layers & Reuse
- best practice: look for existing NN that tackles similar task, then reuse lower layers (aka transfer learning).
# Reuse with TF
Reusing Models from Other Frameworks
- Requires manual loading of weights (ex: Theano)
- Very tedious
'''
original_w = [] # Load the weights from the other framework
original_b = [] # Load the biases from the other framework
X = tf.placeholder(tf.float32, shape=(None, n_inputs), name="X")
hidden1 = fully_connected(X, n_hidden1, scope="hidden1")
[...] # # Build the rest of the model
# Get a handle on the variables created by fully_connected()
with tf.variable_scope("", default_name="", reuse=True): # root scope
hidden1_weights = tf.get_variable("hidden1/weights")
hidden1_biases = tf.get_variable("hidden1/biases")
# Create nodes to assign arbitrary values to the weights and biases
original_weights = tf.placeholder(tf.float32, shape=(n_inputs, n_hidden1))
original_biases = tf.placeholder(tf.float32, shape=(n_hidden1))
assign_hidden1_weights = tf.assign(hidden1_weights, original_weights)
assign_hidden1_biases = tf.assign(hidden1_biases, original_biases)
init = tf.global_variables_initializer()
with tf.Session() as sess:
sess.run(init)
sess.run(
assign_hidden1_weights,
feed_dict={original_weights: original_w})
sess.run(
assign_hidden1_biases,
feed_dict={original_biases: original_b})
[...] # Train the model on your new task
'''
'\noriginal_w = [] # Load the weights from the other framework\noriginal_b = [] # Load the biases from the other framework\n\nX = tf.placeholder(tf.float32, shape=(None, n_inputs), name="X")\nhidden1 = fully_connected(X, n_hidden1, scope="hidden1")\n\n[...] # # Build the rest of the model\n\n# Get a handle on the variables created by fully_connected()\n\nwith tf.variable_scope("", default_name="", reuse=True): # root scope\n hidden1_weights = tf.get_variable("hidden1/weights")\n hidden1_biases = tf.get_variable("hidden1/biases")\n\n# Create nodes to assign arbitrary values to the weights and biases\noriginal_weights = tf.placeholder(tf.float32, shape=(n_inputs, n_hidden1))\noriginal_biases = tf.placeholder(tf.float32, shape=(n_hidden1))\n\nassign_hidden1_weights = tf.assign(hidden1_weights, original_weights)\nassign_hidden1_biases = tf.assign(hidden1_biases, original_biases)\n\ninit = tf.global_variables_initializer()\n\nwith tf.Session() as sess:\n sess.run(init)\n sess.run(\n assign_hidden1_weights, \n feed_dict={original_weights: original_w})\n \n sess.run(\n assign_hidden1_biases, \n feed_dict={original_biases: original_b})\n \n [...] # Train the model on your new task\n'
Freezing Lower Layers
- If 1st DNN already learned low-level features, try to reuse them by freezing the weights.
- simplest way:
# provide all trainable var in hidden layers 3,4 & outputs to optimizer function
# (this omits vars in hidden layers 1,2)
'''
train_vars = tf.get_collection(
tf.GraphKeys.TRAINABLE_VARIABLES,
scope="hidden[34]|outputs")
# minimizer can't touch layers 1,2 - they're "frozen"
training_op = optimizer.minimize(
loss,
var_list=train_vars)
'''
'\ntrain_vars = tf.get_collection(\n tf.GraphKeys.TRAINABLE_VARIABLES,\n scope="hidden[34]|outputs")\n\n# minimizer can\'t touch layers 1,2 - they\'re "frozen"\n\ntraining_op = optimizer.minimize(\n loss, \n var_list=train_vars)\n'
Caching Lower Layers
- Huge speed boost!
'''import numpy as np
n_epochs = 100
n_batches = 500
for epoch in range(n_epochs):
shuffled_idx = rnd.permutation(
len(hidden2_outputs))
hidden2_batches = np.array_split(
hidden2_outputs[shuffled_idx],
n_batches)
y_batches = np.array_split(
y_train[shuffled_idx],
n_batches)
for hidden2_batch, y_batch in zip(hidden2_batches, y_batches):
sess.run(
training_op,
feed_dict={hidden2: hidden2_batch, y: y_batch})
'''
'import numpy as np\n\nn_epochs = 100\nn_batches = 500\n\nfor epoch in range(n_epochs):\n shuffled_idx = rnd.permutation(\n len(hidden2_outputs))\n \n hidden2_batches = np.array_split(\n hidden2_outputs[shuffled_idx], \n n_batches)\n \ny_batches = np.array_split(\n y_train[shuffled_idx], \n n_batches)\n\nfor hidden2_batch, y_batch in zip(hidden2_batches, y_batches):\n sess.run(\n training_op, \n feed_dict={hidden2: hidden2_batch, y: y_batch})\n'
Tweaking/Dropping/Replacing Upper Layers
- original output layer: should be replaced (little chance of reuse)
- iterative freeze/train/compare process to see how many upper layers needed
Model Zoos
- When you want to find a net already trained on a similar task
- TensorFlow Model Zoo
- Caffe Model Zoo - converter on github
Unsupervised pre-training
- Tough problem, but doable.
- Train layers one-by-one, starting with lowest layer
- Freeze completed layers & train next layer on previous results
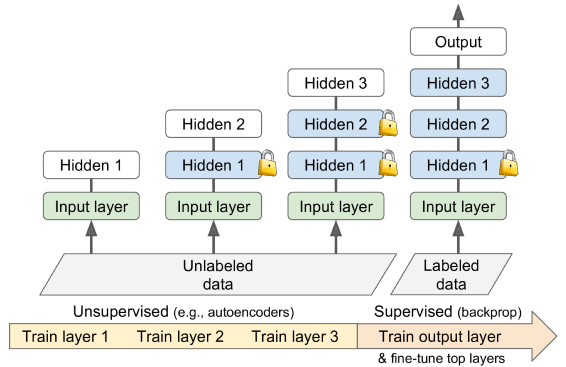
Pre-training on easily labeled data - reuse lower layers for "real" task
- Often required due to cost/availability of large labeled datasets
- Common tactic: label all training data as "good", generate & corrupt additional instances, label new ones as "bad.
Faster Optimizers
- Training speedup strategies thus far: 1) smart weight initializations, 2) smart activation functions, 3) batch normalization, 4) reuse of pretraining.
Better optimizer choices:
- Momentum optimization
- Nesterov Accelerated Gradients
- AdaGrad
- RMSProp
- Adam (should almost always use this one)
Worth noting: below techniques rely on 1st-order partial derivatives (Jacobians); more techniques in literature use 2nd-order derivs (Hessians). Not viable for most deep learning due to memory & computational requirements.
Momentum optimization
- local gradient added to a momentum vector (m) multiplied by learning rate (n)
- ie, gradient used as an accelerant - not as a speed.
- beta hyperparameter serves as friction mechanism. 0 = high friction, 1 = no friction.
- Momentum optimization escapes plateaus much faster than GD.
# in TF
optimizer = tf.train.MomentumOptimizer(
learning_rate=learning_rate,
momentum=0.9)
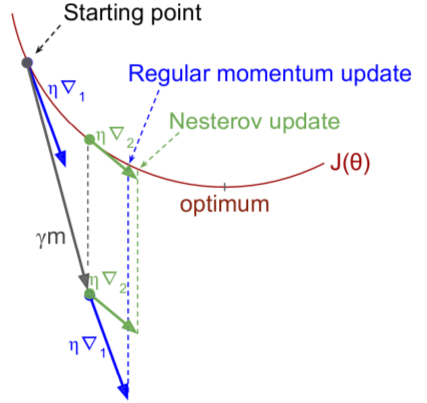
Nesterov Accelerated Gradient
- idea: measure cost function gradient slightly ahead in direction of momentum.
# in TF
optimizer = tf.train.MomentumOptimizer(
learning_rate=learning_rate,
momentum=0.9,
use_nesterov=True)
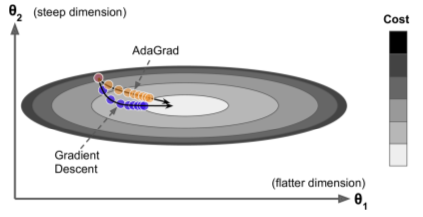
AdaGrad
- Scales gradient vector along steepest dimensions, ie it decays the learning rate faster for steep dimensions. (ie adaptive learning rate)
- Works on simple quadratic problems but often stops too early.
RMSProp
- Fixes AdaGrad problem by accumulating most recent gradients (instead of all).
- Better than AdaGrad on all but very simple problems. Also better than MO and Nesterov.
# in TF
optimizer = tf.train.RMSPropOptimizer(
learning_rate=learning_rate,
momentum=0.9,
decay=0.9,
epsilon=1e-10)
Adam Optimization (paper:)
- Keeps track of decaying past gradients (like Momentum Optimization)
Keeps track of decaying past squared gradients (like RMSProp)
Default params in TF:
- Momentum decay param (beta1) usually set to 0.9
- Scaling decay param (beta2) usually set to 0.999
- Smoothing term (epsilon) usually set to 10e-8
# in TF
optimizer = tf.train.AdamOptimizer(
learning_rate=learning_rate)
Learning Rate Scheduling
# in TF
initial_learning_rate = 0.1
decay_steps = 10000
decay_rate = 1/10
global_step = tf.Variable(
0, trainable=False)
learning_rate = tf.train.exponential_decay(
initial_learning_rate,
global_step,
decay_steps,
decay_rate)
optimizer = tf.train.MomentumOptimizer(
learning_rate,
momentum=0.9)
training_op = optimizer.minimize(
loss,
global_step=global_step)
Regularization Techniques
Early Stopping
- Simply interrupt training when validation performance starts dropping.
L1 & L2 Regularlization
Dropout
- Popular technique - typically adds 1-2% accuracy boost
- At every training step, every neuron has probability (p) of being temporarily ignored
Typical p = 50%
In TF: apply dropout() to input layer & output of every hidden layer.
# in TF
from tensorflow.contrib.layers import dropout
[...]
is_training = tf.placeholder(
tf.bool,
shape=(),
name='is_training')
keep_prob = 0.5
X_drop = dropout(
X,
keep_prob,
is_training=is_training)
hidden1 = fully_connected(
X_drop, n_hidden1, scope="hidden1")
hidden1_drop = dropout(
hidden1, keep_prob, is_training=is_training)
hidden2 = fully_connected(
hidden1_drop, n_hidden2, scope="hidden2")
hidden2_drop = dropout(
hidden2, keep_prob, is_training=is_training)
logits = fully_connected(
hidden2_drop, n_outputs,
activation_fn=None,
scope="outputs")
Max-Norm Regularization
- Each neuron's incoming weights are constrained such that ||w||2 <= r
- r = max-norm hyperparameter
- ||.|| = l2 norm
- Reducing r increases regularization
- Not implemented in TF, but doable.
Data Augmentation
- Generating new training instances from existing ones with learnable differences
- ex: pics with shifts/rotates/resizes/flips/contrasts
- TF has image manipulation ops built-in
Practical Guidelines
- Suggested default DNN configurations:
- Initialization: He
- Activation: ELU
- Normalization: Batch
- Regularization: Dropout
- Optimizer: Adam
- Learning Rate schedule: none