Intro - Visual Cortex
%%html
<style>
table,td,tr,th {border:none!important}
</style>
import matplotlib.pyplot as plt
def plot_image(image):
plt.imshow(image, cmap="gray", interpolation="nearest")
plt.axis("off")
def plot_color_image(image):
plt.imshow(image.astype(np.uint8),interpolation="nearest")
plt.axis("off")
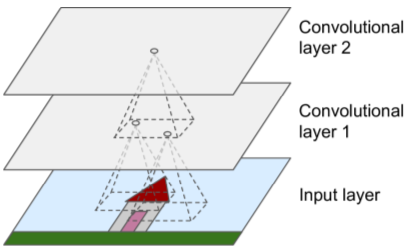
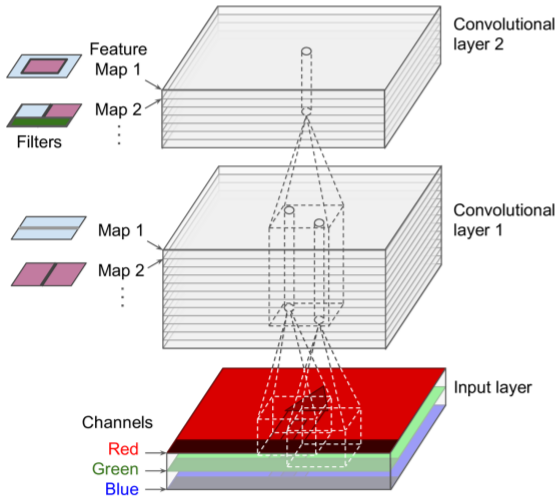
Convolutional Layers
- math detail
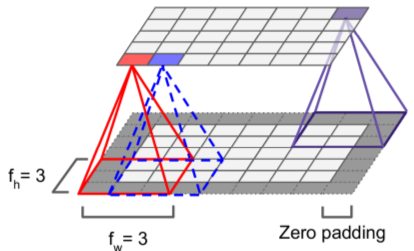
- neurons connected to receptor field in next layer. uses zero padding to force layers to have same height & width.
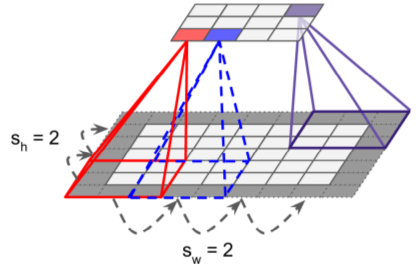
- also can connect large input layer to much smaller layer by spacing out receptor fields (distance between receptor fields = stride)
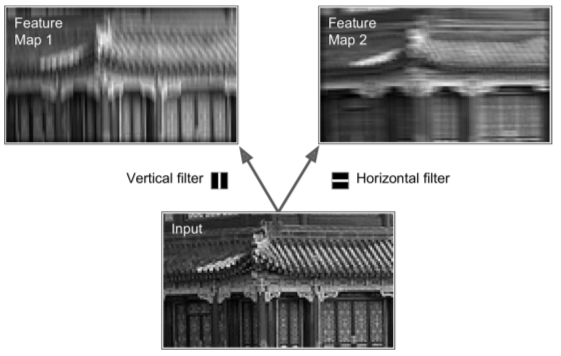
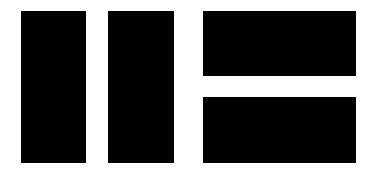
Filters
- neuron weights can look like small image (w/ size = receptor field)
- examples given:
1) vertical filter (single vertical bar, mid-image, all other cells zero)
2) horizontal filter (single horizontal bar, mid-image, all other cells zero)
- both return feature maps (highlights areas of image most similar to filter)
import numpy as np
fmap = np.zeros(shape=(7, 7, 1, 2), dtype=np.float32)
fmap[:, 3, 0, 0] = 1
fmap[3, :, 0, 1] = 1
print(fmap[:, :, 0, 0])
print(fmap[:, :, 0, 1])
plt.figure(figsize=(6,6))
plt.subplot(121)
plot_image(fmap[:, :, 0, 0])
plt.subplot(122)
plot_image(fmap[:, :, 0, 1])
plt.show()
[[ 0. 0. 0. 1. 0. 0. 0.]
[ 0. 0. 0. 1. 0. 0. 0.]
[ 0. 0. 0. 1. 0. 0. 0.]
[ 0. 0. 0. 1. 0. 0. 0.]
[ 0. 0. 0. 1. 0. 0. 0.]
[ 0. 0. 0. 1. 0. 0. 0.]
[ 0. 0. 0. 1. 0. 0. 0.]]
[[ 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0.]
[ 1. 1. 1. 1. 1. 1. 1.]
[ 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0.]
[ 0. 0. 0. 0. 0. 0. 0.]]
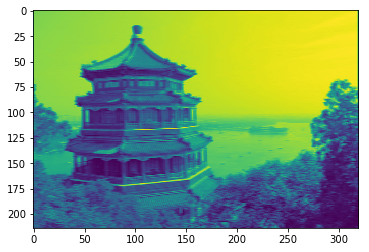
from sklearn.datasets import load_sample_image
china = load_sample_image("china.jpg")
flower = load_sample_image("flower.jpg")
image = china[150:220, 130:250]
height, width, channels = image.shape
image_grayscale = image.mean(axis=2).astype(np.float32)
images = image_grayscale.reshape(1, height, width, 1)
import tensorflow as tf
tf.reset_default_graph()
X = tf.placeholder(
tf.float32,
shape=(None, height, width, 1))
feature_maps = tf.constant(fmap)
convolution = tf.nn.conv2d(
X,
feature_maps,
strides=[1,1,1,1],
padding="SAME",
use_cudnn_on_gpu=False)
with tf.Session() as sess:
output = convolution.eval(feed_dict={X: images})
plt.figure(figsize=(6,6))
plot_image(images[0, :, :, 0])
plot_image(output[0, :, :, 0])
plot_image(output[0, :, :, 1])
plt.show()

%%html
<style>
img[alt=stacking] { width: 400px; }
</style>
Stacking Feature Maps
- images made of sublayers (one per color channel, typical red/green/blue, grayscale = one chan, others = many chans)
import numpy as np
from sklearn.datasets import load_sample_images
dataset = np.array(load_sample_images().images, dtype=np.float32)
batch_size, height, width, channels = dataset.shape
filters = np.zeros(shape=(7, 7, channels, 2), dtype=np.float32)
filters[:, 3, :, 0] = 1
filters[3, :, :, 1] = 1
X = tf.placeholder(tf.float32,
shape=(None, height, width, channels))
convolution = tf.nn.conv2d(
X, filters, strides=[1,2,2,1], padding="SAME")
with tf.Session() as sess:
output = sess.run(convolution, feed_dict={X: dataset})
plt.imshow(output[0, :, :, 1])
plt.show()
%%html
<style>
img[alt=padding] { width: 400px; }
</style>
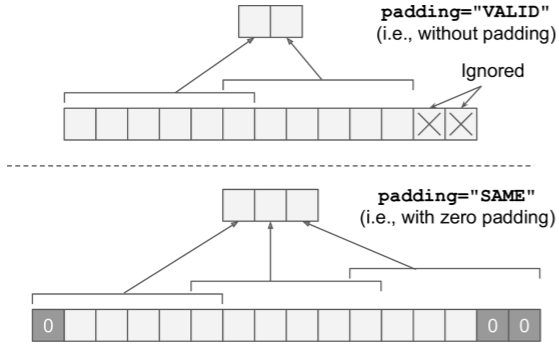
"Valid" v. "Same" Padding
import tensorflow as tf
import numpy as np
tf.reset_default_graph()
filter_primes = np.array(
[2., 3., 5., 7., 11., 13.],
dtype=np.float32)
x = tf.constant(
np.arange(1, 13+1, dtype=np.float32).reshape([1, 1, 13, 1]))
print ("x:\n",x)
filters = tf.constant(
filter_primes.reshape(1, 6, 1, 1))
valid_conv = tf.nn.conv2d(x, filters, strides=[1, 1, 5, 1], padding='VALID')
same_conv = tf.nn.conv2d(x, filters, strides=[1, 1, 5, 1], padding='SAME')
with tf.Session() as sess:
print("VALID:\n", valid_conv.eval())
print("SAME:\n", same_conv.eval())
x:
Tensor("Const:0", shape=(1, 1, 13, 1), dtype=float32)
VALID:
[[[[ 184.]
[ 389.]]]]
SAME:
[[[[ 143.]
[ 348.]
[ 204.]]]]
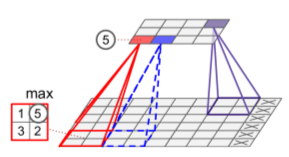
Pooling Layers
- Goal: subsample (shrink) input image to reduce loading.
- Need to define pool size, stride & padding type.
- Result: aggregation function (max, mean)
- Below: max pool, 2x2, stride = 2, no padding.
dataset = np.array([china, flower], dtype=np.float32)
batch_size, height, width, channels = dataset.shape
filters = np.zeros(shape=(7, 7, channels, 2), dtype=np.float32)
filters[:, 3, :, 0] = 1
filters[3, :, :, 1] = 1
X = tf.placeholder(tf.float32,
shape=(None, height, width, channels))
max_pool = tf.nn.max_pool(
X,
ksize=[1, 2, 2, 1],
strides=[1,2,2,1],
padding="VALID")
with tf.Session() as sess:
output = sess.run(max_pool, feed_dict={X: dataset})
plt.figure(figsize=(12,12))
plt.subplot(121)
plot_color_image(dataset[0])
plt.subplot(122)
plot_color_image(output[0])
plt.show()

Memory Requirements
- Main memory killer: reverse pass of backprop - needs all intermediate vals computed during forward pass
- Example CNN:
- 5x5 filters outputting 200 feature maps (size 150,100)
- stride = 1, "SAME" padding
- If image = 150x100x3 (RGB), then
- params_count = (5x5x3+1) * 200 = 15,200
- 200 feature maps contain 150 x 100 neurons => each needs to compute weighted sum of 5x5x3 = 75 inputs => 225M floating-point multiplies.
- If using 32b float => output requires 200x150x100x32 = 96M bits = 11.4MB for one instance
During inference: one layer's memory can be dropped when next layer is computed. (You only need enough memory for two layers).
During training: all computed values have to preserved for reverse pass (You need enough memory for all layers.)
CNN Architectures
LeNet-5 (c. 1998, used to solve MNIST digits dataset)
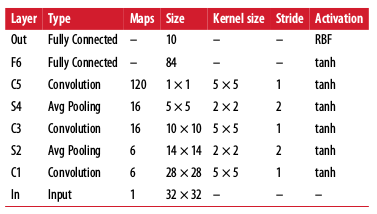
- MNIST images zero-padded to 32x32 & normalized
- pooling layers: mean x learned coefficient + learnable bias
- output layer: output = Euclidian distance (input vect, weight vect)
AlexNet won ILSVRC 2012
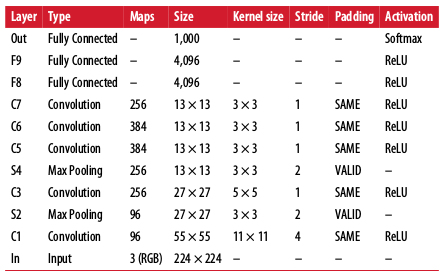
- Uses 50% dropout on layers F8, F9 for regularization
- Uses random image shifts/flips/rotates/lighting to augment dataset
- Uses local response normalization on layers C1, C3.
- Hyperparameter settings: r=2, alpha=0.00002, beta=0.75, k=1
- ZFNet (tweaked AlexNet) won ILSVRC 2013.
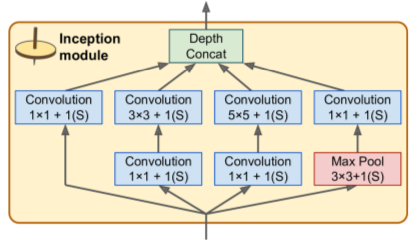
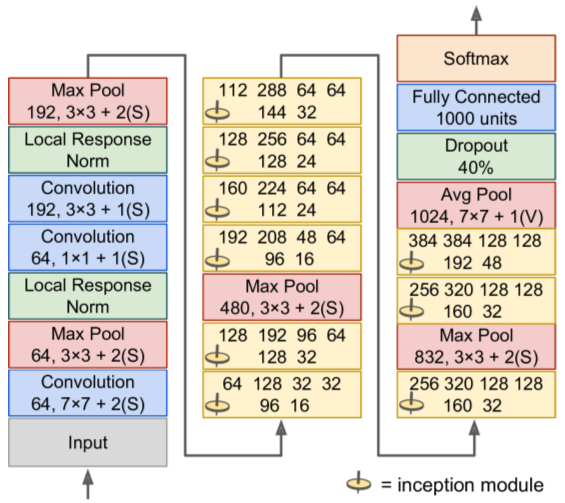
- Much deeper than previous nets
- Uses inception modules to use params much more efficiently. They use 1x1 kernels as "bottleneck layers" (reduces dimensionality). Also: pairs of convo layers act as single more powerful convo layer.
- All convo layers use ReLU activation.
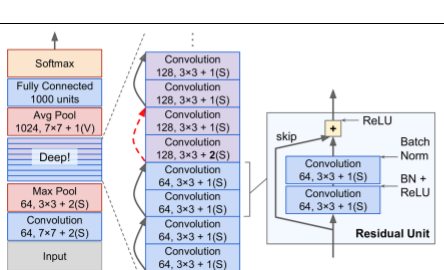
- 152 layers deep
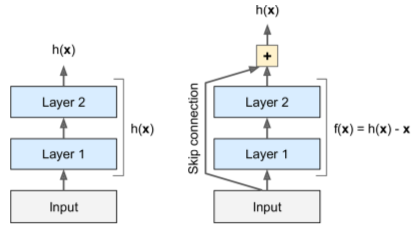
- Uses skip connections to connect non-adjacent layers in stack
- skip connections force learning model f(x) = h(x) - x (residual learning). When initialized, weights near zero => network outputs values near-copy of inputs (identity function).
- architecture: stack starts & ends like GoogLeNet, stack of residual units in between.
TF Convolution Ops
- conv1d() - 1D layer - good for NLP
- conv3d() - 3D layer - good for PET scans
- atrous_conv2D() - 2D layer with "holes"
- conv2d_transpose() - 2D "deconvolutional layer" - upsamples image by inserting zeroes * between inputs
- depthwise_conv2d() - applies every filter to each input channel independently
- separable_conv2d() - depthwise convo, then apply 1x1 CNN layer to result