DENOISING AUTO-ENCODER
import numpy as np
import tensorflow as tf
import matplotlib.pyplot as plt
from tensorflow.examples.tutorials.mnist import input_data
%matplotlib inline
print ("PACKAGES LOADED")
PACKAGES LOADED
MNIST
mnist = input_data.read_data_sets('data/', one_hot=True)
trainimg = mnist.train.images
trainlabel = mnist.train.labels
testimg = mnist.test.images
testlabel = mnist.test.labels
Extracting data/train-images-idx3-ubyte.gz
Extracting data/train-labels-idx1-ubyte.gz
Extracting data/t10k-images-idx3-ubyte.gz
Extracting data/t10k-labels-idx1-ubyte.gz
DEVICE TO USE
device2use = "/gpu:0"
DEFINE NETWORK
n_input = 784
n_hidden_1 = 256
n_hidden_2 = 256
n_output = 784
with tf.device(device2use):
x = tf.placeholder("float", [None, n_input])
y = tf.placeholder("float", [None, n_output])
dropout_keep_prob = tf.placeholder("float")
weights = {
'h1': tf.Variable(tf.random_normal([n_input, n_hidden_1])),
'h2': tf.Variable(tf.random_normal([n_hidden_1, n_hidden_2])),
'out': tf.Variable(tf.random_normal([n_hidden_2, n_output]))
}
biases = {
'b1': tf.Variable(tf.random_normal([n_hidden_1])),
'b2': tf.Variable(tf.random_normal([n_hidden_2])),
'out': tf.Variable(tf.random_normal([n_output]))
}
with tf.device(device2use):
def denoising_autoencoder(_X, _weights, _biases, _keep_prob):
layer_1 = tf.nn.sigmoid(tf.add(tf.matmul(_X, _weights['h1']), _biases['b1']))
layer_1out = tf.nn.dropout(layer_1, _keep_prob)
layer_2 = tf.nn.sigmoid(tf.add(tf.matmul(layer_1out, _weights['h2']), _biases['b2']))
layer_2out = tf.nn.dropout(layer_2, _keep_prob)
return tf.nn.sigmoid(tf.matmul(layer_2out, _weights['out']) + _biases['out'])
print ("NETWORK READY")
NETWORK READY
DEFINE FUNCTIONS
with tf.device(device2use):
out = denoising_autoencoder(x, weights, biases, dropout_keep_prob)
cost = tf.reduce_mean(tf.pow(out-y, 2))
optimizer = tf.train.AdamOptimizer(learning_rate=0.01).minimize(cost)
init = tf.initialize_all_variables()
savedir = "nets/"
saver = tf.train.Saver(max_to_keep=3)
print ("FUNCTIONS READY")
FUNCTIONS READY
OPTIMIZE
do_train = 1
sess = tf.Session(config=tf.ConfigProto(
allow_soft_placement=True, log_device_placement=True))
sess.run(init)
training_epochs = 30
batch_size = 100
display_step = 5
plot_step = 10
if do_train:
print ("START OPTIMIZATION")
for epoch in range(training_epochs):
avg_cost = 0.
num_batch = int(mnist.train.num_examples/batch_size)
for i in range(num_batch):
randidx = np.random.randint(trainimg.shape[0], size=batch_size)
batch_xs = trainimg[randidx, :]
batch_xs_noisy = batch_xs + 0.3*np.random.randn(batch_xs.shape[0], 784)
feed1 = {x: batch_xs_noisy, y: batch_xs, dropout_keep_prob: 0.5}
sess.run(optimizer, feed_dict=feed1)
feed2 = {x: batch_xs_noisy, y: batch_xs, dropout_keep_prob: 1}
avg_cost += sess.run(cost, feed_dict=feed2)/num_batch
if epoch % display_step == 0:
print ("Epoch: %03d/%03d cost: %.9f" % (epoch, training_epochs, avg_cost))
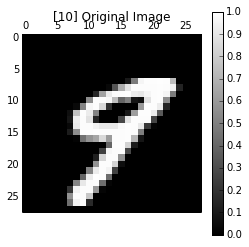
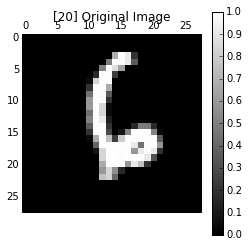
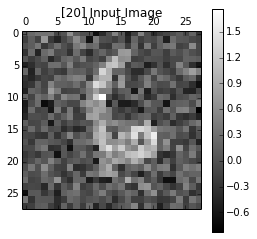
if epoch % plot_step == 0 or epoch == training_epochs-1:
randidx = np.random.randint(testimg.shape[0], size=1)
testvec = testimg[randidx, :]
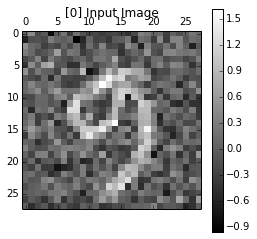
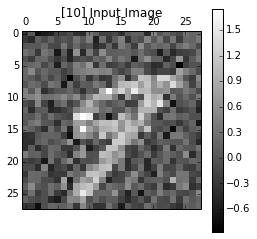
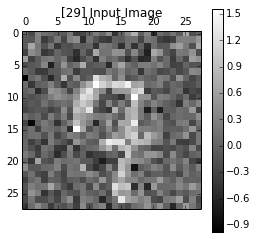
noisyvec = testvec + 0.3*np.random.randn(1, 784)
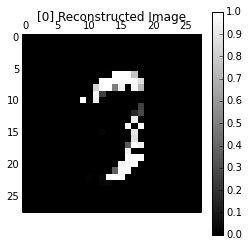
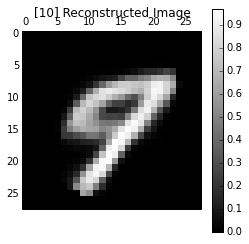
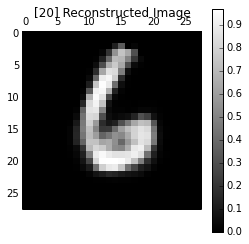
outvec = sess.run(out, feed_dict={x: testvec, dropout_keep_prob: 1.})
outimg = np.reshape(outvec, (28, 28))
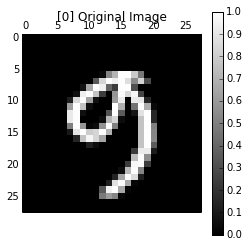
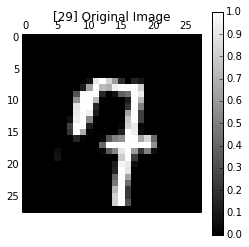
plt.matshow(np.reshape(testvec, (28, 28)), cmap=plt.get_cmap('gray'))
plt.title("[" + str(epoch) + "] Original Image")
plt.colorbar()
plt.matshow(np.reshape(noisyvec, (28, 28)), cmap=plt.get_cmap('gray'))
plt.title("[" + str(epoch) + "] Input Image")
plt.colorbar()
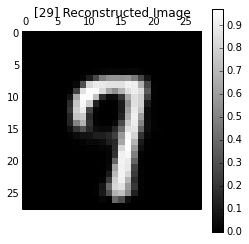
plt.matshow(outimg, cmap=plt.get_cmap('gray'))
plt.title("[" + str(epoch) + "] Reconstructed Image")
plt.colorbar()
plt.show()
saver.save(sess, savedir + 'dae_dr.ckpt', global_step=epoch)
print ("Optimization Finished!")
else:
print ("RESTORE")
saver.restore(sess, "nets/dae_dr.ckpt-" + str(training_epochs-1))
START OPTIMIZATION
Epoch: 000/030 cost: 0.107168743
/usr/lib/pymodules/python2.7/matplotlib/collections.py:548: FutureWarning: elementwise comparison failed; returning scalar instead, but in the future will perform elementwise comparison
if self._edgecolors == 'face':
Epoch: 005/030 cost: 0.033176764
Epoch: 010/030 cost: 0.026914674
Epoch: 015/030 cost: 0.024993547
Epoch: 020/030 cost: 0.023792257
Epoch: 025/030 cost: 0.023201655
Optimization Finished!
TEST
randidx = np.random.randint(testimg.shape[0], size=1)
orgvec = testimg[randidx, :]
testvec = testimg[randidx, :]
label = np.argmax(testlabel[randidx, :], 1)
print ("label is %d" % (label))
ntype = 2
if ntype is 1:
print ("Gaussian Noise")
noisyvec = testvec + 0.1*np.random.randn(1, 784)
else:
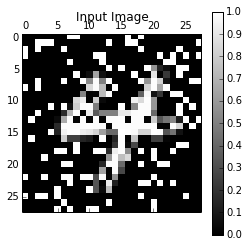
print ("Salt and Pepper Noise")
noisyvec = testvec
rate = 0.20
noiseidx = np.random.randint(testimg.shape[1], size=int(testimg.shape[1]*rate))
noisyvec[0, noiseidx] = 1-noisyvec[0, noiseidx]
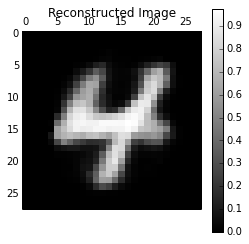
outvec = sess.run(out, feed_dict={x: noisyvec, dropout_keep_prob: 1})
outimg = np.reshape(outvec, (28, 28))
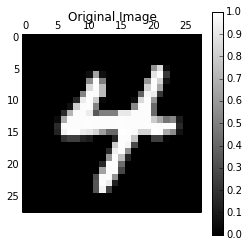
plt.matshow(np.reshape(orgvec, (28, 28)), cmap=plt.get_cmap('gray'))
plt.title("Original Image")
plt.colorbar()
plt.matshow(np.reshape(noisyvec, (28, 28)), cmap=plt.get_cmap('gray'))
plt.title("Input Image")
plt.colorbar()
plt.matshow(outimg, cmap=plt.get_cmap('gray'))
plt.title("Reconstructed Image")
plt.colorbar()
plt.show()
label is 4
Salt and Pepper Noise
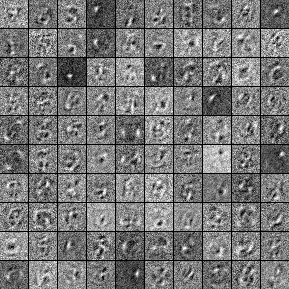
PLOT FILTER SHAPES
from PIL import Image
def scale_to_unit_interval(ndar, eps=1e-8):
""" Scales all values in the ndarray ndar to be between 0 and 1 """
ndar = ndar.copy()
ndar -= ndar.min()
ndar *= 1.0 / (ndar.max() + eps)
return ndar
def tile_raster_images(X, img_shape, tile_shape, tile_spacing=(0, 0),
scale_rows_to_unit_interval=True,
output_pixel_vals=True):
assert len(img_shape) == 2
assert len(tile_shape) == 2
assert len(tile_spacing) == 2
out_shape = [(ishp + tsp) * tshp - tsp for ishp, tshp, tsp
in zip(img_shape, tile_shape, tile_spacing)]
if isinstance(X, tuple):
assert len(X) == 4
if output_pixel_vals:
out_array = np.zeros((out_shape[0], out_shape[1], 4), dtype='uint8')
else:
out_array = np.zeros((out_shape[0], out_shape[1], 4), dtype=X.dtype)
if output_pixel_vals:
channel_defaults = [0, 0, 0, 255]
else:
channel_defaults = [0., 0., 0., 1.]
for i in range(4):
if X[i] is None:
out_array[:, :, i] = np.zeros(out_shape,
dtype='uint8' if output_pixel_vals else out_array.dtype
) + channel_defaults[i]
else:
out_array[:, :, i] = tile_raster_images(X[i], img_shape, tile_shape, tile_spacing, scale_rows_to_unit_interval, output_pixel_vals)
return out_array
else:
H, W = img_shape
Hs, Ws = tile_spacing
out_array = np.zeros(out_shape, dtype='uint8' if output_pixel_vals else X.dtype)
for tile_row in range(tile_shape[0]):
for tile_col in range(tile_shape[1]):
if tile_row * tile_shape[1] + tile_col < X.shape[0]:
if scale_rows_to_unit_interval:
this_img = scale_to_unit_interval(X[tile_row * tile_shape[1] + tile_col].reshape(img_shape))
else:
this_img = X[tile_row * tile_shape[1] + tile_col].reshape(img_shape)
out_array[
tile_row * (H+Hs): tile_row * (H + Hs) + H,
tile_col * (W+Ws): tile_col * (W + Ws) + W
] \
= this_img * (255 if output_pixel_vals else 1)
return out_array
w1 = sess.run(weights["h1"])
image = Image.fromarray(tile_raster_images(
X = w1.T,
img_shape=(28, 28), tile_shape=(10, 10),
tile_spacing=(1, 1)))
image