感知机
让我们了解神经网络的最基本构建块,感知机,也称为人工神经元。感知机的概念起源于 Frank Rosenblatt 于 1962 年的作品。
您可能希望阅读以下工作来探索神经网络的起源:
Frank Rosenblatt,神经动力学原理:感知器和脑机制理论。 斯巴达书籍,1962 年
在最简化的视图中,感知机被建模在生物神经元之后,使得它接收一个或多个输入并将它们组合以产生输出。
如下图所示,感知机采用三个输入并将它们相加以生成输出y:
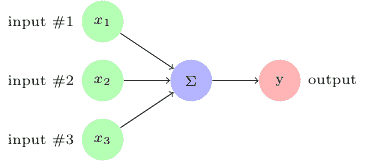
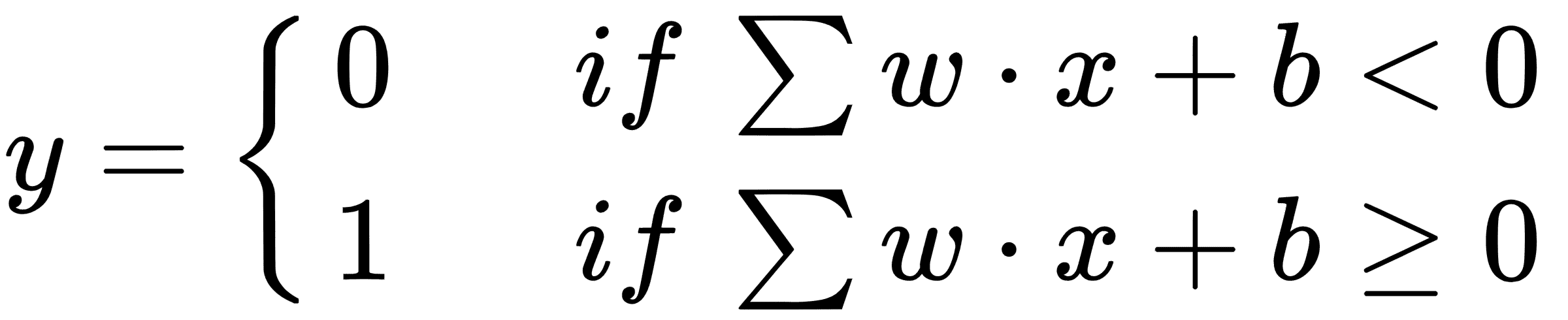
这种感知机太简单了,不具备任何实际用途。因此,通过添加权重,偏差和激活函数的概念来增强它。将权重添加到每个输入以获得加权和。如果加权和Σw[i]x[i]小于阈值,则输出为 0,否则输出为 1:

阈值称为偏差。让我们将偏差移到等式的左边,用b表示它,Σw·x代表w和x的向量点积。感知机的等式现在变为如下:
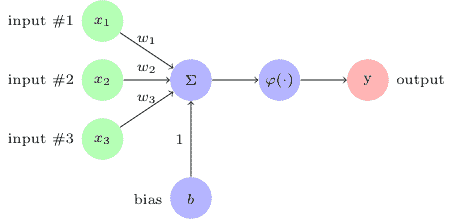
感知机现在看起来像下图:
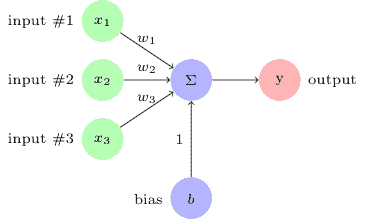 Simple perceptron with weights and bias
Simple perceptron with weights and bias
到目前为止,神经元是一个线性函数。为了使这个神经元产生非线性决策边界,通过称为 a ctiva 或传递函数的非线性函数运行求和输出。有许多流行的激活函数可用:
ReLU:整流线性单元,将值平滑到范围(0, x),
sigmoid: Sigmoid 将值平滑到(0, 1),
tanh:双曲正切将值平滑到(-1, 1),
使用激活函数,感知机的等式变为:

其中φ(·)是激活函数。
神经元看起来像下图: